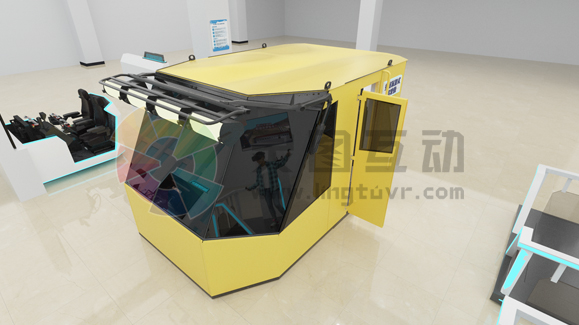
重型卡车驾驶训练模拟器基于半实物仿真技术和虚拟现实技术,模拟了卡车驾驶的全过程,给受训人员提供了一个逼真的操纵环境和视觉场景,具备与实际车辆基本一致的现场感觉,可用于完成驾驶训练中的所有科目和内容,能够达到提高驾驶训练水平的目的。有利于驾驶培训的正规化、科学化和规范化,并具有节能、安全、经济、全天候和培训效率高等优点。
重型卡车驾驶训练模拟器主要由操纵模拟机构、显示仪表、信号数据采集系统和视景软件组成。通过在固定的台架中,布置与实车完全一致的驾驶操纵机构,为学员提供一个逼真的操作环境。在驾驶席位正前方的液晶显示器上,显示视景计算机生成的动态交通场景。学员坐在驾驶座椅上,通过方向盘及各种操纵机构发出操纵指令,经由调理电路后,通过CAN总线传输给视景计算机,实现模拟驾驶训练。视景计算机中的软件系统根据视景模型中车辆的实时车况,包括加速度、速度、油温和气压等信号一并发送给虚拟仪表盘,学员可以通过虚拟仪表盘了解车辆的性能、动态,从而做出相应的判断。

1. 操纵机构
重型卡车驾驶训练模拟器的操纵机构主要包括了方向盘、变速档、离合器、刹车、油门以及其他的翘板开关等。其中方向盘、踏板机构、换挡机构是操纵机构设计的重点,其逼真程度直接影响到模拟器的训练效果。
1.1 模拟方向盘设计
操控系统通过检测方向盘的转动信号,实现行驶转向。转向机构在方向盘中心轴加工传动螺纹,带动磁钢上下移动,将方向盘的转动信号转化为磁钢的直线位移信号,提高了系统测量精度。实车方向盘双向转动角度不超过900°,转向机构采用齿轮齿条与限位块控制方向盘的转角范围,将AH49E高精度线性霍尔传感器成对安装于滑块两端,构成差分检测,以信号幅值之差作为输出,驱动虚拟视景中布雷车的转向动作,进一步提高了测量精度与灵敏度。
1.2 踏板机构设计
油门踏板、制动踏板与离合器踏板的输出信号为连续变化的模拟量。踏板机构利用WDD35-D导电塑料角度传感器采集转动信号,将踏板的转动量转换为角度传感器的输出信号。踏板与一个扇形齿弧固定连接,齿弧与角度传感器转轴啮合,放大了转轴的转动角度,提高了信号检测精度,踏板安装在同一根转动轴上,利用回位弹簧产生反馈力。以油门踏板为例,根据实车测量结果,其行程约为37°,在踏板扇形齿弧侧面加工导向槽,由固定在机架上的限位销限制其行程。
1.3 换挡机构设计
该型特种车辆具有八个前进挡,一个爬坡挡,一个倒退挡,换挡机构要为操纵杆提供十个驻留位置,当操纵杆到达某一挡位时产生一定闭锁力,阻止其继续前进;在换挡过程中还要有一定反馈力,使其产生回位的趋势。换挡机构操纵杆端部内嵌了钢珠和弹性体,正常情况下钢珠被弹性体压紧并卡在导向凹槽内,满足了闭锁力要求;前后换挡时,与操纵杆相连接的两个弹簧分别压缩与拉紧,提供回位的反馈力。

2. 数据采集系统
数据采集系统负责实时收集和传输驾驶员操作数据以及车辆状态信息。采用CAN总线技术,允许多个设备在同一网络中通信的协议,不仅确保了数据传输的高速和稳定,还提供了错误检测和校正机制,保障了数据的准确性。
2.1 数据采集系统硬件设计
模拟训练系统操作特性的逼真度取决于两个方面:一是正确选择传感器,将其精确安装,减少偏心、间隙以及定位误差,保证传感器检测精度;二是开发高精度的数据采集系统,对传感器输出信号进行整流、滤波与降噪处理,还原真实、准确的操纵信息。
该重型卡车驾驶训练模拟器数据采集系统由各部件的微处理器、CAN 控制器、CAN收发器以及相应的调理电路组成。系统根据信号类型选用相应的传感器检测操纵部件的动作,将位置、速度、加速度等物理量转换为电信号,并经过调理电路、A/D转换电路、CAN 通信接口,由微处理器识别、采集,通过 CAN 总线发送相应的信号,以驱动虚拟三维场景,实现驾驶场景的输出,其组成包括模拟操作部件一传感器一调理电路-节点微处理器(MCU)-CAN控制器CAN 收发器-CAN 总线,采集各路数字量、模拟量输入信号。
2.2 数据通信协议设计
根据系统总线的通信需求与控制策略,统计网络节点的数目与类型;根据系统设计需求,明确所有通信节点的信号通道数、数据类型、字节长度及其传输速率;根据节点数目与数据特点,确定报文帧类型以及标识符分配方案,包括报文优先级的定义、报文源地址与目标地址的编码、数据保留位制定等,以优化数据传输进程,缩短数据发送、读取与延迟时间,提高数据传输的实时性与可靠性;根据系统通信需求,对8字节的数据域进行空间分配。

3. 软件系统
重型卡车驾驶训练模拟器的软件系统由虚拟仪表盘和视景仿真软件系统两大核心组成部分构成,它们共同为驾驶员提供了一个高度仿真的训练环境。
3.1 虚拟仪表盘设计
该重型卡车仪表盘包括指示灯、按键开关以及双针气压表、转速表、车速里程表等指针式仪表,涉及到开关量、模拟量、脉冲量信号的输入与输出。如采用实装仪表盘,会造成系统成本过高、驱动电路复杂、开发周期长的问题,影响模拟训练的经济性。
利用计算机便捷的图形编程环境开发基于LabVIEW语言的虚拟仪表盘,设计逼真的仪表显示界面,模拟了真实卡车中的各种仪表盘和指示器。利用VISA通信模块读取串口字节数据,截取驾驶席处理单元发送的操纵信号字符串,按照通信协议进行解析与处理,利用数据处理函数进行分析,计算踏板踩下行程、方向盘转动角度等操作数据以及发动机转速、底盘车行驶速度、气动系统工作压力等技术状态,将运算结果作为输入端,驱动前面板指示灯、仪表等显示控件。让驾驶员能够实时监控车辆状态,以便能够迅速做出反应。
3.2 视景仿真软件系统设计
该重型卡车驾驶训练模拟器软件系统主要采用Unity引擎开发,构建一个逼真的虚拟驾驶环境。根据虚拟仿真需求,选择了3Dmax和Unity进行相应的场景建模和实时驱动渲染。针对系统实时性要求,提出了地表渲染以及景物建模的优化技术。通过分析车辆驾驶模拟器的实时驱动渲染系统,针对其中的碰撞检测和环境特效,做了深人的研究和分析,分别提出了基于自定义包围盒和Tripod法的碰撞检测方法,并且构造了基于粒子系统的降雨系统和实时控制模型。整个软件系统基于先进的车辆动力学模型设计开发,方向盘的转动力变化、车辆操控反应、道路反馈信息和车辆的技术性能仿真度较高。
根据重型卡车的训练标准重型卡车驾驶训练模拟器设置了车辆起步和停车、百米换挡驾驶、坡道起步、8子路驾驶、直角转向限制路、进出车库、蝶形移位、公路掉头、限制路驾驶等科目;根据车辆行驶经常遇到的状况,设计了超车、会车、倒车、多车编队、定点停靠、城市道路驾驶、高速公路驾驶等模拟场景,具备各种训练科目、道路条件、天候条件选择功能。同时,模拟器具备考核评判功能,能够及时正确的评定成绩,考核与训练过程可以全程回放,能够复现训练全景。
重型卡车驾驶训练模拟器采用半实物仿真的方式,给卡车训练提供了逼真的驾驶环境和操作反馈。它通过高精度的操纵机构、力反馈系统和沉浸式视景软件,模拟真实驾驶体验,有效提升驾驶员技能和应对复杂路况的能力。