

工业机器人技术专业虚拟仿真实训系统
通过对工业机器人技术专业虚拟仿真实训系统,以多样化的表现方式和交互手段激发学习兴趣,让学生在身临其境的环境中达到对工业机器人技术专业课程的实训学习。让学生了解工业机器人的技术基础及相关行业应用;掌握工业机器人系统集成工作过程及相关技术;掌握工业机器人应用编程及故障诊断技巧;了解工业机器人的分类及应用流程。
工业机器人技术专业虚拟仿真实训系统
通过对工业机器人技术专业虚拟仿真实训系统,以多样化的表现方式和交互手段激发学习兴趣,让学生在身临其境的环境中达到对工业机器人技术专业课程的实训学习。让学生了解工业机器人的技术基础及相关行业应用;掌握工业机器人系统集成工作过程及相关技术;掌握工业机器人应用编程及故障诊断技巧;了解工业机器人的分类及应用流程。
内置课程
内容说明
-
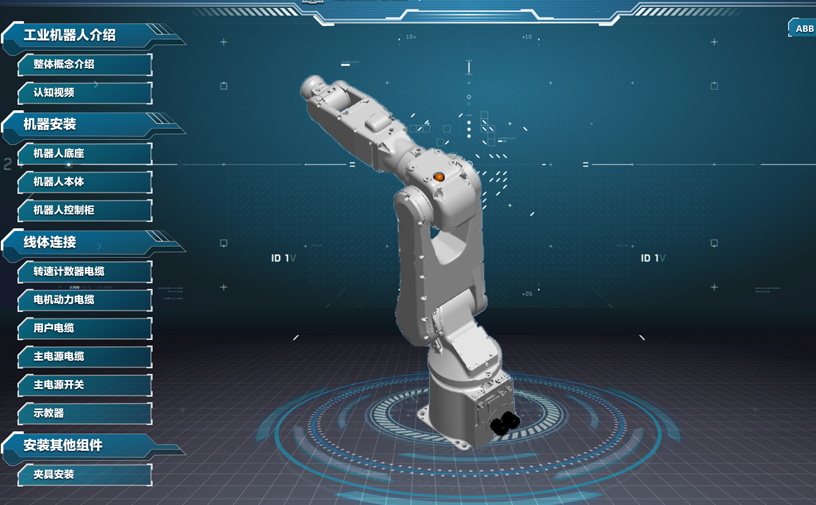
工业机器人技术及应用
课程将从初级的工业机器人整体概念介绍开始,逐步深入。了解基本概念、掌握各部件、零件的作用、原理,最后在操作提示下进行操作练习。在实训系统中,还可以实现对于工业机器人的编程练习,掌握工业机器人码垛工作站系统编程的全流程操作。
-
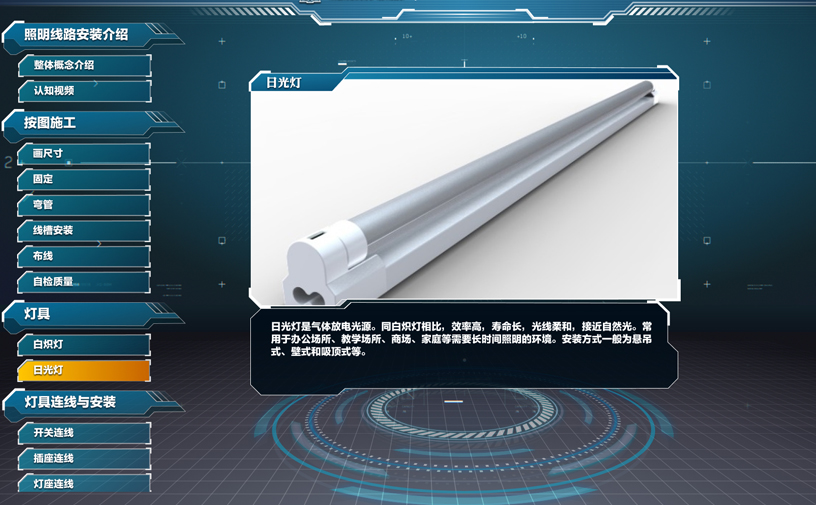
电工实训
内容涉及三种触电方式与室内照明线路的安装两个部分。三种触电主要是对各种触电情况的认知与救护方式了解。室内照明线路的安装是对照明线路安装工艺的学习。
-
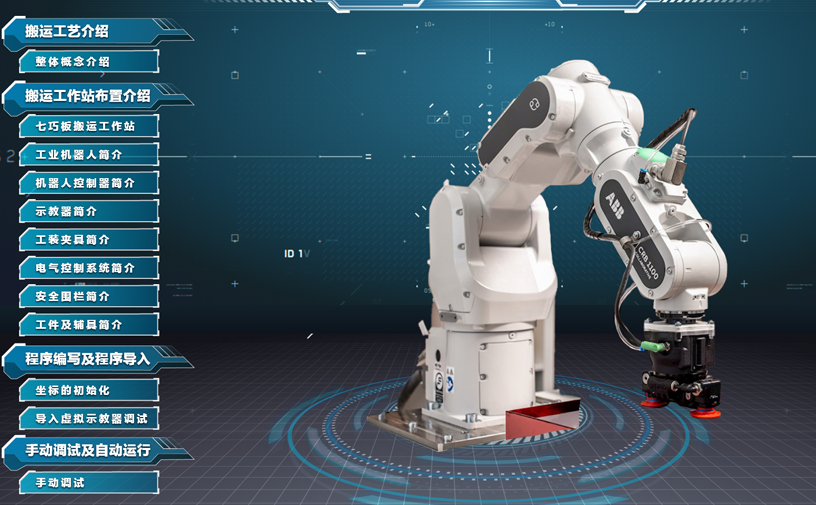
工业机器人操作与运维
先让学生对于工业机器人打磨、七巧板搬运和陀螺装配的运行原理、状态有一定的概念,然后逐步了解与这些操作相关的设备、部件,而后调试机器人的参数,进行程序编写、导入,工件坐标系设定及校准,手动调试及自动运行,掌握工业机器人操作与运维的全流程。
-

工业机器人应用编程
将ABB初级与中级工业机器人应用编程实操考核试题任务书中的任务做成实训项目,学生可以通过实训系统进行任务实操练习,还可以在系统中进行模拟考核,自动评分。
-

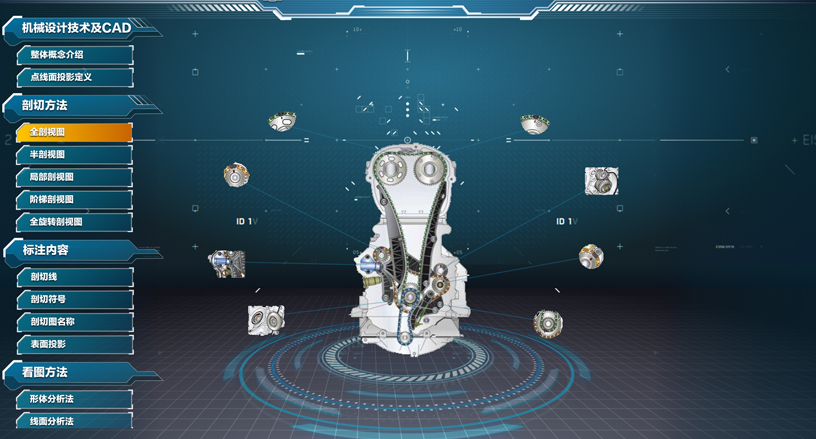
机械设计技术及CAD
课程内容涵盖三投影面体系建立与展开仿真、组合体绘图读图过程仿真、剖视图剖切过程仿真三部分。首先介绍机械设计整体概念、点线面投影定义,而后对三投影面体系形成及展开过程、组合体绘图读图过程、剖视图剖切过程进行仿真。
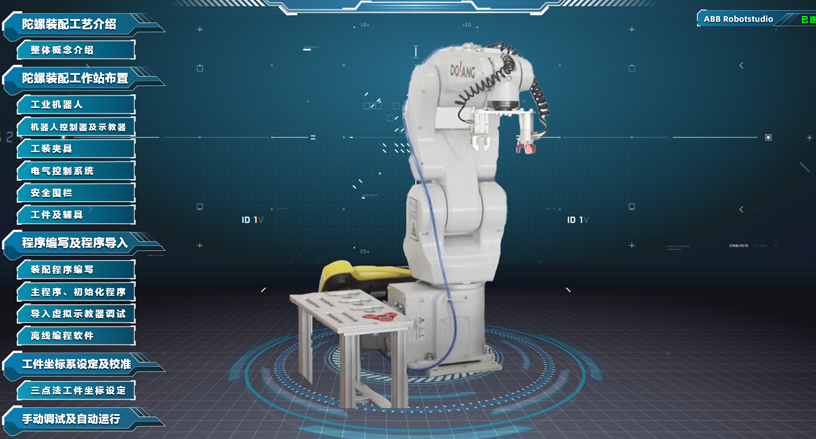
工业机器人陀螺装配操作与调试
教学步骤
-
01
概念介绍
机器人陀螺装配工艺介绍,图文、视频的形式说明,介绍内容包含:整体概念介绍。
-
02
工作站布置介绍
机器人陀螺装配工作站布置介绍,给定典型陀螺装配工作站,点击部件查看相应简介内容,设备包含工业机器人、机器人控制器及示教器、工装夹具、电气控制系统、安全围栏、工件及辅具等。
-
03
示教器操作
工业机器人示教器操作,机器人开机及参数配置、模式切换以及手动控制。
-
04
程序编写与导入
使用 RobotStudio 或示教器进行机器人陀螺装配程序编写,包含主程序、初始化程序。其中初始化程序完成夹持、取件、装配位置等坐标的初始化,装配路径程序完成初始点、取件点、装配路径、复位等内容,编写的程序导入虚拟示教器进行调试,与离线编程软件连接。
-
05
工件坐标系设定及校准
使用虚拟示教器进行三点法工件坐标数据的设定,并通过修改位置进行校准,与离线编程软件连接。
-
06
手动调试及自动运行
使用虚拟示教器进行手动调试,执行程序代码,并进行相应的修改,调试完成进行自动运行,播放陀螺装配动画,与离线编程软件连接。

027-81803001
联系邮箱:
service@lingtuvr.com
联系地址:
武汉市东湖高新技术开发区大学园路2号徽商大厦B座


企业公众号
鄂ICP备16014868号-1
灵图互动(武汉)科技有限公司版权所有Copyright © 2019-2021
