
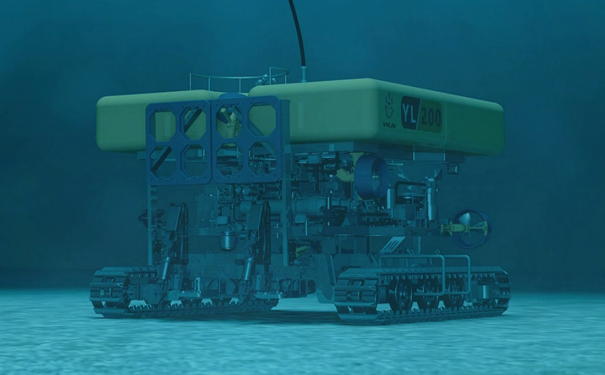
水下机器人虚拟仿真培训系统
水下机器人虚拟仿真培训系统用于ROV水下机器人的模拟操作培训,分为教练端与学员端,教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。通过ROV下潜、机械臂操作的模拟,以及物理引擎、粒子特效的仿真开发,真实还原ROV水下机器人的操作环境,带给学员超真实的培训体验。
水下机器人虚拟仿真培训系统
水下机器人虚拟仿真培训系统用于ROV水下机器人的模拟操作培训,分为教练端与学员端,教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。通过ROV下潜、机械臂操作的模拟,以及物理引擎、粒子特效的仿真开发,真实还原ROV水下机器人的操作环境,带给学员超真实的培训体验。
实训场景
-
搜寻与求援场景
模拟水下机器人通过声呐对潜航器进行定位,并实施救援。
-
失事船舶定位与辐射探测
对水下机器人搜寻失事船舶,并进行辐射探测的场景进行仿真。
-
失事飞机黑匣子的搜寻与打捞
模拟水下机器人对黑匣子的定位,以及打捞操作。
-
失事的ROV、AUV以及鱼雷的搜寻与打捞
对水下机器人搜寻失事的机器人或者鱼雷,以及打捞作业场景的仿真。
-
线缆的铺设与维修
模拟水下机器人定位埋藏于海底的光缆,并进行相关作业。
-
采油阀门开关及插头插拔
控制水下机器人下降至油井支架处,旋转开关、插拔插头的操作场景仿真。
-
海面LARS吊装
模拟水下机器人从海面下沉到指定位置的全流程操作。
关键技术
-
1
ROV下潜模拟操作
在Unity物理引擎中,可对物体进行重量、受力等进行模拟仿真。为了达到逼真的控制效果,采用随机数,通过对ROV的额外受力来模拟整个下浅过程,同时加入惯性系统,使得操作手可以以更加贴近现实的方式进行ROV的水下游行。
-
2
ROV机械臂模拟操作
机械臂的操作是ROV操作作业中的重要组成部分,开发一套通用插件,进而在Unity中实现机械臂与操纵杆的联动。为了达到训练效果,还将机械臂引入物理引擎,操作手可真实的感受到机械碰撞与夹取。
-
3
一维声纳传感器模拟仿真
声纳传感器如同ROV的眼睛,它提供了前方障碍物的轮廓与距离。在Unity中,采用射线追踪法来模拟水下声纳探测的过程。其原理是在传感器所在位置,向前方发射一条射线,通过碰撞检测,来判别前方是否有障碍物。
-
4
绳索物理引擎仿真开发
利用Unity的物理引擎,通过铰链的方式来模拟海底线缆的铺设以及剪切。


视频演示
更多优秀案例
-

凿岩台车虚拟仿真训练系统
凿岩台车虚拟仿真训练系统是为陕西铁路工程职业技术学院打造的轨道交通智慧建造实训室项目,是一项结合了虚拟现实、仿真模拟和凿岩台车实际操作体验的综合性技术项目。通过凿岩台车半实物模拟仿真驾驶舱,结合凿岩台
了解详情 -

水下潜航器模拟仿真训练系统
水下潜航器模拟仿真训练系统是一套设备海洋模拟训练仿真系统,集合航行器、水下滑翔机、无人艇、缆控水下机器人等4种海洋设备相关基础理论知识学习、演示教学、航行操控、载荷操控训练及综合运用演练等训练内容,让
了解详情 -
水下机器人虚拟仿真培训系统
水下机器人虚拟仿真培训系统用于ROV水下机器人的模拟操作培训,分为教练端与学员端,教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。通过ROV下潜、机械臂操作的模拟,以及物
了解详情 -
-

徐工重型起重机远程智能操控系统
起重机远程智能操控系统采用无线视频技术、无线网络通讯技术,结合平板等智能设备的移动终端软件,当智能设备连接起重机车辆上的无线路由器后,可通过系统实现起重机车辆信息查看、故障诊断、虚拟仪表等功能。帮助徐
了解详情
与灵图互动一起
触碰现在,感知未来
027-81803001
联系邮箱:
service@lingtuvr.com
联系地址:
武汉市东湖高新技术开发区大学园路2号徽商大厦B座


企业公众号
鄂ICP备16014868号-1
灵图互动(武汉)科技有限公司版权所有Copyright © 2019-2021
