水下机器人仿真模拟器是一款用于进行作业型遥控潜水器(ROV)模拟操作训练的半实物模拟仿真器,它由软件系统与硬件系统组成。利用通讯技术,可以使用真实设备来操作水下机器人虚拟仿真系统,同时会将模拟结果反馈到显示器上显示,不仅实现了仪表显示的真实模拟,而且是真实感更强。

1. 水下机器人仿真模拟器的软件系统
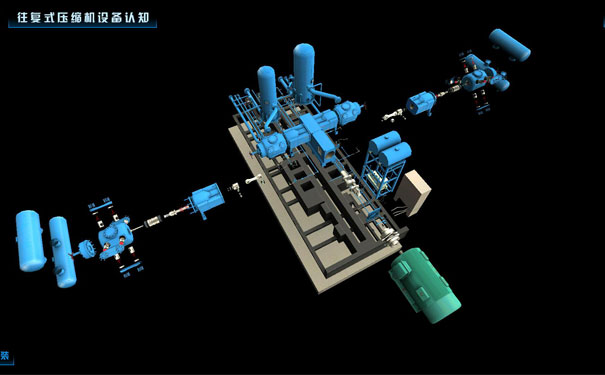
作业型遥控潜水器(ROV)模拟操作系统基于实地操作现场,1:1比例建模,真实模拟作业场景,沉浸感更强。共包含环境模拟;操纵模拟;海底结构物模拟;视频、图像和灯光模拟;声呐模拟;机械手模拟;水下模拟场景作业及数控功能等八类子系统模块。
1.1 环境模拟
水下作业海洋环境的模拟,适用于所有作业的场景,主要包括:流速、流向、可见度、水下噪音。
1.2 操纵模拟
以带有中继器(TMS)的作业型遥控潜水器为蓝本进行设计,能够实现水下载体脱离/回归中继器,水下载体前进/后退、上浮下潜、旋转/纵倾等基本操作模拟。
1.3 海底结构物模拟
根据作业场景的要求,构建水下三维可交换模型。
1.4 视频、图像和灯光模拟
能够模拟视频、图像和灯光的控制,并构建与真实世界相同的视觉效果。
1.5 声呐模拟
能够模拟主流ROV声纳的功能设置,并构建与真实声纳相同的水下目标探测效果。
1.6 机械手模拟
机械手可以模拟进行作业空间的伸展、抓取、旋转、回位、双手协同等作业。与硬件结构的5功能和7功能机械手结构相匹配。
1.7 水下模拟场景作业
可以模拟水下剪切解绞缠、声纳搜寻定位与抵近观察、水下封闭环境观察探测、飞行记录仪搜寻与打捞、水下航行器搜寻与救援、水下钢缆连接与固定、辐射探测与定位等水下场景作业。
1.8 数控功能
数控软件具备作业参数设置,作业过程开始/暂停/停止、监控、过程录制、回放等控制功能。

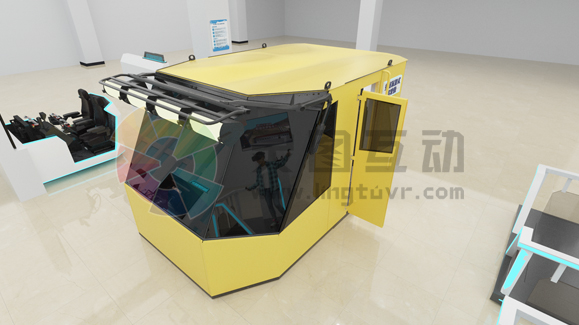
2. 水下机器人仿真模拟器的硬件系统
水下机器人仿真模拟器的硬件系统主要是作业型遥控潜水器(ROV)模拟操作系统控制室,通过使用真实控制室来操作虚拟作业型遥控潜水器(ROV),让人感觉就是在操作真实的ROV。控制室按照通讯协议解析后控制虚拟遥控潜水器(ROV),模拟结果反馈到显示器上显示,实现了显示的真实模拟。系统还支持鼠标键盘等多种操作方式。
虚拟仿真模拟系统中所有物体都可以赋予重量,碰撞,速度等物理属性,可以逼真地表现出遥控潜水器(ROV)从中继器(TMS)脱离/回归中继器,水下前进/后退、上浮下潜、旋转纵倾等基本操作模拟。 能够模拟视频、图像和灯光的控制,并构建与真实世界相同的视觉效果,。机械手可以进行作业空间的伸展、抓取、旋转、回位、双手协同等作业。与硬件结构的5功能和7功能机械手结构相匹配,最大限度地保证了虚拟仿真系统的真实感。
作业型遥控潜水器(ROV)模拟操作系统控制室主要由操作台、视频墙
2.1 操作台
定制适合人员操纵和硬件布置的操纵台位,与屏幕墙协同布置,适合2人同时操纵。主工位配置1套5功能的开关控制操纵手柄和1套7功能的主从控制操纵手柄;实体按钮设置与其功能相匹配,采用不锈钢和铝材经过防腐蚀处理。操作台工位计算机2台,采用win10版本操作系统,能够满足操作控制台位信息采集、处理、交互等流畅运行。操作台配有两个前后上下可调节的航空座椅,可以根据操作人员不同身材自行调节。
2.2 视频墙
每个屏幕为单独输出显示。视频墙由6个显示器组成;单个显示器尺寸为40英寸;分辨率为3840×2160(4K);
视频墙能够显示遥控潜水器水下作业模拟的海洋环境;带中继器(TMS)的作业型遥控潜水器实现水下载体脱离/回归中继器,水下载体前进/后退、上浮下潜、旋转/纵倾等基本操作模拟;海底结构物模拟;视频、图像和灯光控制得模拟,并构建与真实世界相同的视觉效果;主流ROV声纳功能图像,并构建与真实声纳相同的水下目标探测效果;机械手作业空间的伸展、抓取、旋转、回位、双手协同等作业;水下作业场景:包括水下剪切解绞缠;声纳搜寻定位与抵近观察;水下封闭环境观察探测;飞行记录仪搜寻与打捞;水下航行器搜寻与救援;水下钢缆连接与固定;辐射探测与定位。模拟过程的录制、回放功能。
2.3 人机界面
由于本系统的庞大性和复杂性,一位驾驶员很难独立完成作业。所以,本系统是按照双位驾驶员共同操作的模式来设定的。
其中主控手负责控制机器人本身的位置、姿态、行首定位等等。
辅控手负责操作机器人的作业单元,辅助TMS和机器人之间的对接和释放等等。
本系统的人机界面总共由五块界面构成,他们分别是负责主驾驶员数据界面,副驾驶员数据界面,主驾驶员操纵界面,副驾驶员操纵界面和PDU数据显示界面构成。

通过使用水下机器人仿真模拟器对受训学员的不断训练,强化其在操作过程中的规范和安全意识,增强具体培训效果。较之刻板的规章学习与文本宣讲教学方式,本系统具有使用成本低、风险系数小、临场实感强、教学效果好、可扩展性强等特点,应用最先进的尖端技术,体现了企业先进的培训管理文化和技术上超前的思想和实力,企业的数字信息化建设真正落到实处。