ROV水下作业模拟器是一种可以模拟ROV不同作业环境,让操作人员在模拟环境下熟悉ROV水下作业操作完成作业任务训练的半实物仿真模拟训练设备。

1. ROV水下作业模拟器架构
ROV水下作业模拟器主要由硬件系统、软件系统和系统集成三部分构成。
1.1 硬件系统
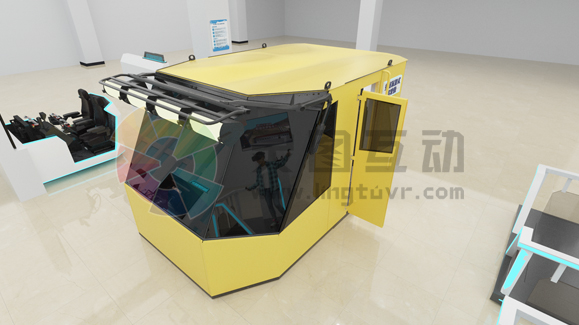
硬件系统是ROV水下作业模拟器的基础,主要包括控制面板、仿真显示器、键盘鼠标和模拟器控制箱。
(1)控制面板:模拟真实的ROV控制面板,包括各种按钮、开关、摇杆和显示器,用于操作ROV模拟器。控制面板的设计旨在提供与实际操作ROV相似的体验,使训练更加贴近实际情况。
(2)仿真显示器:高分辨率的显示器展示水下环境的三维视图,包括ROV的视角和各种传感器数据,如声纳图像,提供沉浸式的操作体验。
(3)键盘鼠标:用于执行特定的操作和输入命令,模拟在真实ROV操作中可能使用的计算机辅助控制。
(4)模拟器控制箱:集成了模拟器的核心硬件组件,如处理器、传感器接口和其他必要的电子设备,确保模拟器的稳定运行。
1.2 软件系统
软件系统是ROV水下作业模拟器的核心,主要包括作业场景建立、运动控制模块设计、面板控制模块实现、通讯模块设计、培训界面设计等。
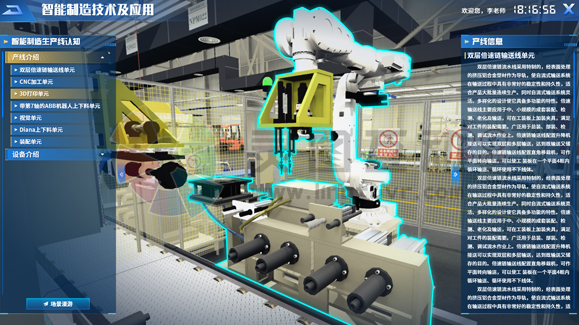
(1)作业场景建立:创建逼真的水下环境和作业场景,包括海底地形、作业场景周围天气情况、海风和海浪等外部环境,为操作人员提供了一个全面、真实的模拟操作体验,使其仿佛置身于真实的ROV作业场景中。
(2)运动控制模块设计:模拟ROV的运动特性,包括推进器控制、姿态调整和航行路径规划,确保操作的准确性和实时性。
(3)面板控制模块实现:将控制面板的输入信号转换为模拟器可以理解的命令,实现对ROV模拟器的精确控制。
(4)通讯模块设计:模拟ROV与水面支持船只之间的通讯链路,包括数据传输和远程指令执行。
(5)培训界面设计:依照培训软件功能需求和ROV操作人员的操作需求设计了ROV水下作业模拟器培训软件的显示界面,包括登录界面、主功能界面、培训模式选择界面和数据显示界面
1.3 系统集成
系统集成是将硬件和软件组件结合起来,形成一个协调一致的培训平台。它确保所有部分都能无缝工作,提供高质量的培训体验。系统集成还包括:
(1)数据同步:确保模拟器中的所有组件和子系统都能同步运行,提供一致的训练环境。
(2)用户交互:优化用户界面和交互设计,确保操作人员可以轻松地控制模拟器并接收反馈。

2. ROV水下作业模拟器功能
ROV水下作业模拟器可以实现视景仿真、ROV运动、机械手运动、摄像机控制、灯光控制等功能。
2.1 ROV运动仿真
ROV水下作业模拟器能够模拟ROV在水中的各种运动,包括水平运动、升沉运动和回转运动。这些运动仿真是通过物理引擎和动力学模型来实现的,确保了操作的真实感和准确性。例如,通过六自由度机械手三维运动仿真研究,可以对机械手的运动学模型进行构建以及运动轨迹规划的实现,这对于ROV的运动仿真具有普遍性参考价值。
2.2 机械手运动仿真
ROV水下作业模拟器可以模拟机械手的各种动作,如伸缩旋转、抬起放下和抓取等。这些动作的仿真需要精确的运动学模型和轨迹规划算法,以确保机械手能够准确地执行各种复杂的任务。例如,通过研究七功能水下机械手的运动学及虚拟样机运动仿真,可以对机械手的运动学正解、雅可比矩阵进行求解,并进行误差分析和动态干涉分析。
2.3 摄像机控制
ROV水下作业模拟器中的摄像机控制功能允许操作人员调整摄像机的拍摄位置,以获取更好的视野和更详细的图像信息。这在ROV进行水下观察、检测和作业时非常重要。例如,通过多摄像机控制功能,可以将一台摄像机设置为控制另一台摄像机,实现多角度的拍摄和监控。

2.4 灯光控制
ROV水下作业模拟器还包括对灯光的控制,操作人员可以根据需要调节灯光的开关和强度。这对于在能见度较低的水下环境中进行作业尤为重要。智能灯光控制系统可以实现灯光状态和亮度的智能化控制,通过无线通信、传感器和人工智能算法等现代技术实现。
2.5 视景仿真
视景仿真是ROV模拟系统仿真实现最为基础的部分,视景仿真系统可以将ROV在海底作业的全部运动及作业操作直观地显示出来,通过这些画面使操作人员直接地学习ROV水下作业的注意事项和工作流程,练习操作方法,减少实际操作过程中的失误;还可对ROV水下作业可能遇到的各种情况进行预演,评估各类水下机器人水下作业任务的可操作性,提高作业速度,确保工作安全。
视景仿真系统模拟生成的显示画面包括远程操纵ROV外围观察和进入作业等视觉场景及ROV运动、机械手作业等操作场景,操作人员可以利用这些信息确定ROV任务的可操作性。
推荐案例:灵图互动水下机器人虚拟仿真培训系统