
水下机器人虚拟仿真实训平台
通过对ROV下潜、机械臂操作的模拟仿真,以及物理引擎、粒子特效的仿真开发,真实还原ROV水下机器人的操作环境。系统分为教练端与学员端。教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。系统包含潜航器的搜寻与救援操作场景;失事船舶搜寻定位与辐射探测操作场景;失事飞机黑匣子的搜寻与打捞操作场景;失事水下机器人、鱼雷的搜寻与打捞操作场景;线缆的铺设与维修操作场景;采油阀门开关
水下机器人虚拟仿真实训平台
通过对ROV下潜、机械臂操作的模拟仿真,以及物理引擎、粒子特效的仿真开发,真实还原ROV水下机器人的操作环境。系统分为教练端与学员端。教练端可以对学员的培训、考核进行设置,学员端根据教练端的设置进行培训或者考核。系统包含潜航器的搜寻与救援操作场景;失事船舶搜寻定位与辐射探测操作场景;失事飞机黑匣子的搜寻与打捞操作场景;失事水下机器人、鱼雷的搜寻与打捞操作场景;线缆的铺设与维修操作场景;采油阀门开关
软硬件设计
System scheme features


系统优势
System scheme advantages
-
01
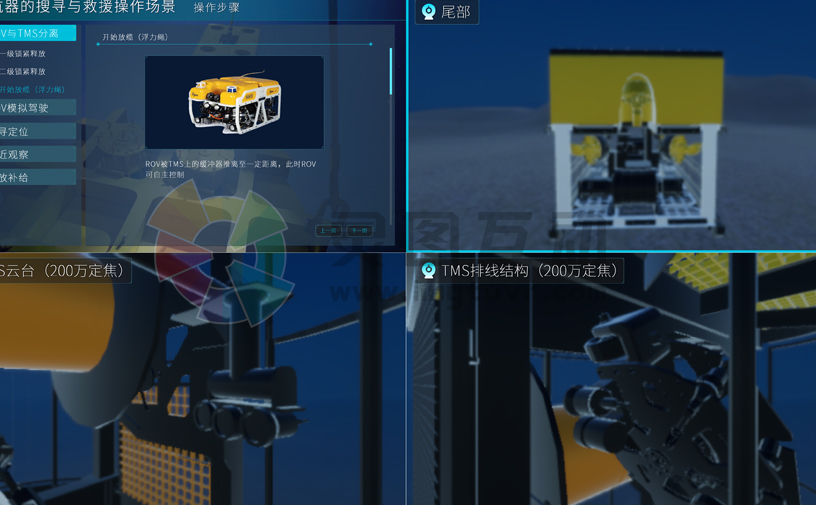
ROV操作全流程
水下机器人虚拟仿真实训系统中包含七类操作场景,每个场景中的实训操作都涵盖水下机器人入水、完成任务后与TMS进行对接的全流程操作步骤。让学员在进行实训的过程中,真实感受水下机器人操作的完整流程。
-
02
操作场景全覆盖
水下机器人虚拟仿真实训系统包含的七类操作场景,基本涵盖水下机器人的常规功能操作,例如,水下机器人下水时的吊装操作;搜寻打捞;辐射探测;剪切线缆;旋转开关;插拔插头等等。
-
03
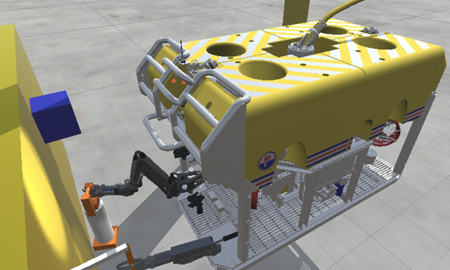
1:1仿真操作台
根据水下机器人真实的操作台1:1制作水下机器人虚拟仿真实训操作台,并且实现运用实物操作台操控虚拟水下机器人的功能,让学员通过虚拟仿真实训,熟练水下机器人的操作步骤后,可以直接在真实的水下机器人操作台上进行操作,无缝对接。
-
04
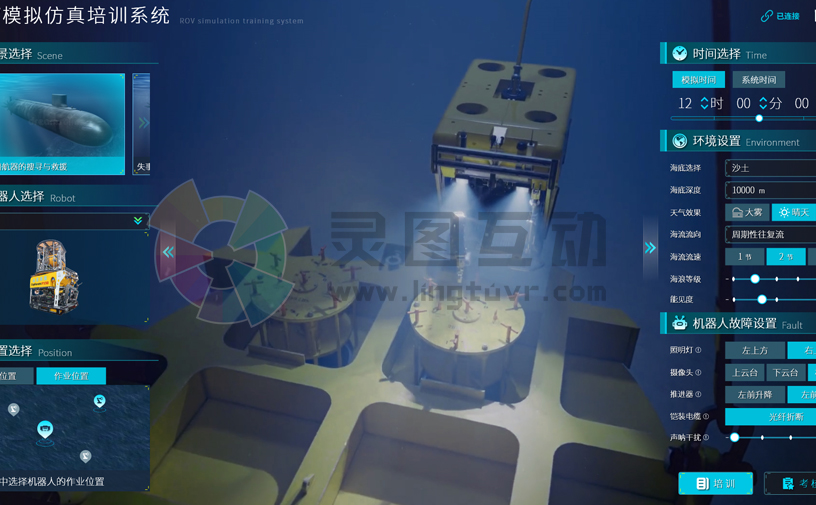
实训环境可设置
水下机器人虚拟仿真操作系统分为教练端与学员端,教练登录教练端,在学员开始实训前,对实训环境进行设置。例如,对ROV下放的位置与目标的位置进行设定;选择海底地貌;实训场景的时间、天气、风力、海流等相关设置。
-
05
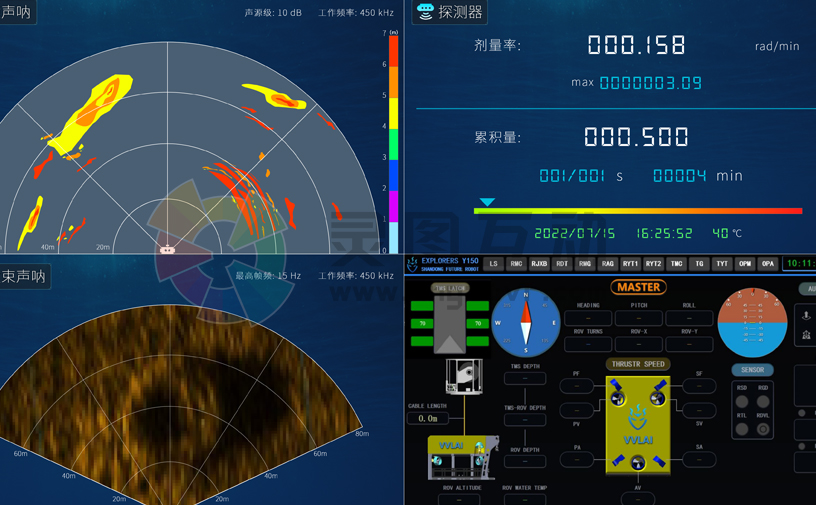
模拟声呐定位
水下机器人虚拟仿真操作系统可以模拟水下声纳探测的过程。系统采用射线追踪法,与真实的声呐定位原理一致。随机增加一些虚拟的浮游生物,并且对其他海底生物发出的声呐进行仿真,模拟运用水下声呐定位可能发生的情况。
027-81803001
联系邮箱:
service@lingtuvr.com
联系地址:
武汉市东湖高新技术开发区大学园路2号徽商大厦B座


企业公众号
鄂ICP备16014868号-1
灵图互动(武汉)科技有限公司版权所有Copyright © 2019-2021
