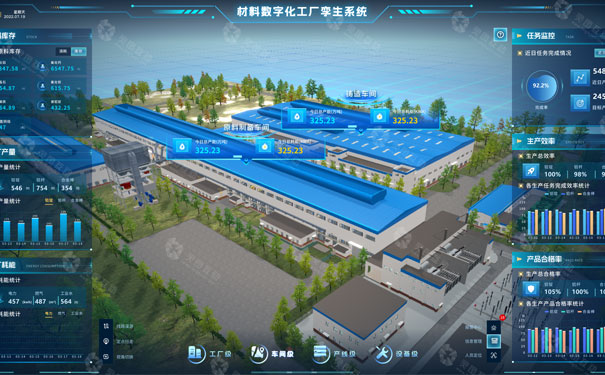
电厂泵站巡检机器人数字孪生系统面向电厂设备巡检的工作场景,利用虚拟现实、数据采集以及数字孪生等技术,在数字空间对电厂内的建筑、设备等要素建立1:1高保真模型,再集成融合现有的多源异构系统,实现虚拟场景的关键指标、设备运行情况及环境状态与真实场景的孪生映射,复现真实工作场景。达到信息管理集中化,监控内容可视化,信息获取及时化以及提高管理效率的目的。
电厂泵站巡检机器人数字孪生系统的功能主要涵盖通用功能、巡检场景模拟及环境可视化、巡检机器人可视化、孪生数据实时映射及分析管理、监控中心等五大模块。
1. 通用功能模块
通用功能模块是数字孪生系统的基础功能,满足用户在系统内进行正常的旋转、缩放、快速定位、视角转换、选择选中、鼠标事件等三维虚拟场景交互操作,同时通过图层的方式来对机器人数据、环境监测、视频监控和设备监控等四类数据进行分层管理。
2. 巡检场景模拟及环境可视化
2.1. 巡检场景孪生同态
对真实巡检场景的电厂循泵房、配电间、电子室、水泵房等环境;水泵、仪表等相关设备及巡检机器人进行1:1三维孪生建模,实现虚实孪生同态映射。

2.2. 巡检过程即时可见
通过巡检机器人数字孪生系统,可以实时查看巡检过程,了解巡检的具体情况,巡检信息即时可见。
利用机器人视相远程监控,实时调取当前机器人的可见光视频以及红外热成像视频,并可以点击放大缩小。能够查看巡检图片,播放巡检短视频和声音。
2.3. 巡检过程溯源回放
通过巡检机器人数字孪生系统,可以查看过去巡检过程的溯源回放。根据巡检时间的选择,调取数据库中的历史巡检过程信息,用户即可查看历史巡检过程的回放。
2.4. 巡检机器人可视化
2.4.1. 巡检机器人孪生同态
将空间信息数据与三维场景进行匹配,确保机器人定位和路径等与现场机器人的空间位置一致。在三维巡检场景中同步机器人的任务指令和巡检动作等,实现三维场景中的机器人与现场机器人完全一致。

2.4.2. 机器人实时状态监控
机器人作为系统的主体调度及监控设施,其工作过程信息为巡检人员关注的重点,在三维场景中,系统将机器人的主要数据以二三维结合的方式实时显示,供巡检人员实时监控,及时判断。
随着机器人空间位置的转换,专项显示机器人的运行过程信息。机器人运行状态和实时数据展示,如速度、里程、电量等。当机器人即将达到运维周期时,及时预警现场人员提前准备。
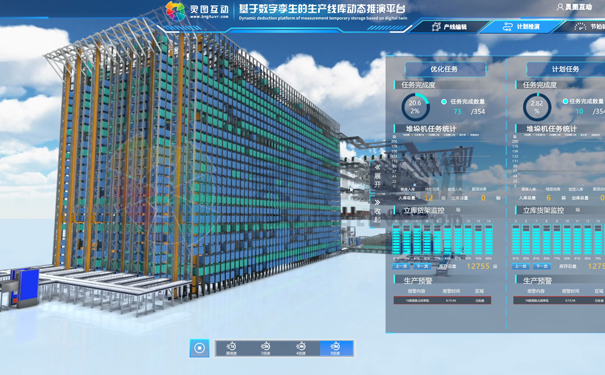
3. 孪生数据实时映射及分析管理
3.1. 各类数据综合管理及可视化
对现场设备、设施的大量多模态数据搭建成大数据平台,在三维孪生场景中实时同态显示各类检测的数值,如液位、压力、温度、转速等巡检点位数值,关键部件设备指示状态、控制柜指示灯状态、漏水检测和水位计识别等。同时还支持对超出检测标准的点位进行报警提示,对历史数据能以曲线的方式展示。
3.1.1. 环境监测
环境是正常生产的红线,巡检机器人数字孪生系统将现场四大环境监测的传感器点位同步还原,根据实时获取的环境监测数据,在三维孪生场景中实时同态显示出有害气体、温度/湿度、震动、噪音监测的数值,并对超出环境监测要求的点位进行预报警提示,辅以悬浮窗的形式展示环境监控点位的报警内容。
3.1.2. 设备监控
巡检机器人数字孪生系统的设备监控模块针对巡检场景内重点工作设备的当前的基本运行参数(基本属性、厂家信息等)、设备运行状态(运行、空闲)、设备维保预测(维保情况、健康状态)等信息进行同态展示。
3.1.3. 视频监控
巡检机器人数字孪生系统的视频监控模块通过接入现场实时监控的点位以及画面信息,如现场可见光视频和红外热成像视频等,以二维面板和三维点选的方式供用户选择使用。
3.1.4. 异常报警
异常报警是巡检机器人数字孪生系统的综合报警显示模块,也是系统的首要监控提示内容,报警中心页面中统计了每个子模块的报警情况,包含:机器人运行状态、任务执行情况报警、关键设备运行报警、机器人及现场设备运维情况预/报警、各类环境监测装置预/报警、人员报警以及备品备件库存状态预/报警,展现形式包含二维、三维两种。

3.1.5. 机器人工作报表管理
巡检机器人数字孪生系统的机器人工作报表管理模块结合用户需求,制定报表设计内容框架模板,基于报表模板之上,提供模板统计表设计、基础函数运算库,报表数据查询及导出功能。
4. 监控中心
巡检机器人数字孪生系统的监控中心,结合用户的监控需求,将用户关心的数据内容以图表的形式总结运算,展示在同一面板,满足用户的集中监控需求。
泵站巡检机器人数字孪生系统通过场景模拟、过程可视化、数据映射、数据分析管理等功能,提升了巡检效率,实现了电厂的无人化值守理念。
推荐案例:灵图互动巡检机器人智能调度数字孪生系统